Feature
◆Current loop design, high torque at low speed, smooth operation
◆High torque high speed output, the maximum speed reaches 10000rpm/min(depend on speed of motor)
◆Speed control: 0-5V analog , PWM(10Hz-500Hz),RS485 communication control
◆With signal input terminals EN (start/stop), DIR (direction),Brake
◆With speed ,error signal output
◆With protection function of over current, over voltage, under voltage and motor block
This product can achieve the following functions
◆Speed open loop operation with hall sensor
◆Speed close loop operation with hall sensor
◆Speed open loop operation without hall sensor
◆Speed close loop operation without hall sensor
Electrical Performance
(Ambient Tj=25℃)
| Power supply |
AC85V~264V |
| Rated current |
≤5A |
| Rated power |
Max 1100W |
| Insulation resistance |
﹥500MΩ at normal temperature |
| Insulation strength |
0.5KV, 1min at normal temperatures and pressures |
Working Environment:
| Cooling |
natural cooling or forced air cooling |
| Working environment |
Situation |
avoid dust, oil mist and corrosive gases |
| Temperature |
0℃~+50℃ |
| Humidity |
﹤80%RH, no condensation, no frost |
| vibration |
﹤0.5G(4.9m/s2 )10Hz-60Hz, non-continuous operation |
| Storage temperature |
-20℃~+65℃ |
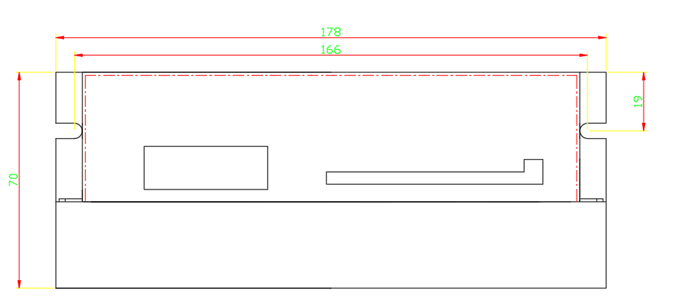
| Size |
178*108*70mm |
| Weight |
≈0.9Kg |
[Note] Due to the drastic changes in the temperature of the storage and transportation environment, condensation or frosting is likely to occur. The driver only can be powered on when the temperature of the driver is consistent with the ambient temperature after being placed in this environment for more than 12 hours.
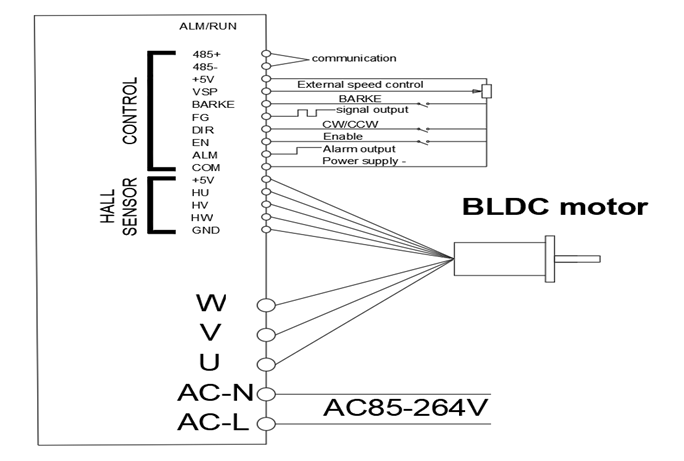
Instructions for the terminal
| Function |
Mark |
Description |
| RS485 termial |
RS485+
RS485- |
Connect PLC or computer to set driver |
| Control |
BRK |
Brake signal input, working on low level |
| ALM |
Alarm signal output. Output low level when error in driver |
| +5V |
power supply positive(Built-in power output) |
| VSP |
External speed control signal, 0-100% of the motor speed adjustment through external potentiometer to change VSP voltage, 0~5V |
| FG |
Motor speed pulse output, motor actual speed can be converted by measuring the frequency of this signal |
| DIR |
Motor CW/ CCW rotation control ,CCW when connect DIR to GND,CW when not connect DIR to GND |
| EN |
Motor enable control, EN is connected to GND, prohibiting the drive from running;EN is not connected to GND, allowing the drive to run. |
| GND |
Control signal ground |
| Hall sensor |
+5V |
Hall power supply positive |
| HA |
Hall sensor signal A phase input |
| HB |
Hall sensor signal B phase input |
| HC |
Hall sensor signal C phase input |
| GND |
HALL power ground |
| Motor |
U、V、W |
motor three-phase output signals |
| GND、V+ |
AC85V~264V input |
FUNCTION DESCRIPTION
| Speed control mode (VSP) |
1. Connect with external potentiometer to adjust speed: connect the two fixed ends of the external potentiometer (5K~10K) to the GND and +5V terminals of the driver respectively. By connecting regulating terminal to the VSP terminal. The speed can be controlled by external potentiometer, or inputting analog voltage to VSP terminal through other control units (such as PLC, MCU, etc.). The voltage range of the VSP port is DC 0V~+ 5V, corresponding to the speed of motor from 0 to max speed. |
| 2. Input PWM signal to adjust speed: connect PWM signal positive terminal to VSP terminal and negative terminal to GND. By setting the +5V PWM signal with the frequency of 100Hz~100KHz, through PWM duty cycle change to achieve speed adjustment. |
| Speed signal output(FG)
|
The drive provides speed pulse signal of motor which is proportional to motor speed.
Speed calculation method: motor speed (RPM) = F÷N×60
F = Actual frequency measured on the FG pin with the frequency meter
N = motor poles pair (2 pairs pole motor N=2; 4 pairs pole motor N=4)
For example, if the user selects a 4pairs poles motor, when the output FG signal is 200 Hz, motor speed = 200 ÷ 4 × 60 = 3000 rpm. |
|
CW/ CCW rotation
(DIR) |
By controlling the high and low level transitions of DIR terminal to control rotation of the motor.
Note: In order to avoid huge impact to motor and mechanical equipment when motor changes direction suddenly at high speed, the drive decelerate the motor until it stops when DIR terminal receives commutation signal, then the motor changes direction and accelerates to the set speed. |
| Start/stop
(EN)
|
By controlling the high and low level transitions of EN terminal to control RUN/STOP of the motor. Motor runs normally when EN is in low level and stops when in high. When the start/stop is used to control the motor to stop, the motor stops naturally. Its motion law is related to load inertia. Factory setting is EN for allowed operation. |
Detailed error codes table
| |
Indicator light |
Description |
Note |
| 1 |
stop one time when flickering twice |
Under voltage Fault |
|
| 2 |
stop one time when flickering three times |
Over voltage Fault |
|
| 3 |
stop one time when flickering four times |
Over current Fault |
|
| 4 |
stop one time when flickering five times |
Block rotation fault |
The motor is not running or the motor wire is not connected |
| 5 |
stop one time when flickering six times |
short circuit fault |
Motor coil open circuit or motor wire open circuit |